



A four-legged robotic educated by synthetic intelligence has realized the identical lesson because the Apollo astronauts—that leaping will be one of the simplest ways to maneuver round on the floor the moon. An replace on LEAP (Legged Exploration of the Aristarchus Plateau), a mission idea examine supported by ESA to discover a few of the most difficult lunar terrains, has been introduced at the moment on the Europlanet Science Congress (EPSC) 2022 in Granada by Patrick Bambach.
“LEAP’s goal is the Aristarchus plateau, a area of the moon that’s notably wealthy in geologic options however extremely difficult to entry,” stated Patrick Bambach of the Max Planck Institute for Photo voltaic System Analysis in Germany. “With the robotic, we will examine key options to check the geologic history and evolution of the moon, just like the ejecta round craters, recent influence websites, and collapsed lava tubes, the place materials might not have been altered by space weathering and different processes.”
The LEAP staff is working in the direction of the robotic being built-in on ESA’s European Giant Logistic Lander (EL3), which is scheduled to land on the moon a number of instances from the late 2020s to the early 2030s. LEAP relies on the legged robotic, ANYmal, developed at ETH Zürich and its spin-off ANYbotics. It’s at the moment tailored to the lunar atmosphere by a consortium from ETH Zurich, the Max Planck Institute for Photo voltaic System Analysis, OHB, the College of Münster, and the Open College.


“Conventional rovers have enabled nice discoveries on the moon and Mars, however have limitations,” stated Bambach. “Exploring terrain with loose soil, massive boulders or slopes over 15 levels are notably difficult with wheels. For instance, the Mars rover, Spirit, had its mission terminated when it acquired caught in sand.”
ANYmal can transfer in several strolling gaits, enabling it to cowl massive distances in a brief period of time, climb steep slopes, deploy scientific instruments, and even recuperate within the unlikely occasion of a fall. The robotic may also use its legs to dig channels within the soil, flip over boulders or smaller rocks for additional inspection, and decide up samples.
Initially, the robotic has been educated utilizing a Reinforcement Studying method in a virtual environment to simulate the lunar terrain, gravity and dust properties. It has additionally been deployed within the discipline for an outside hike.
-
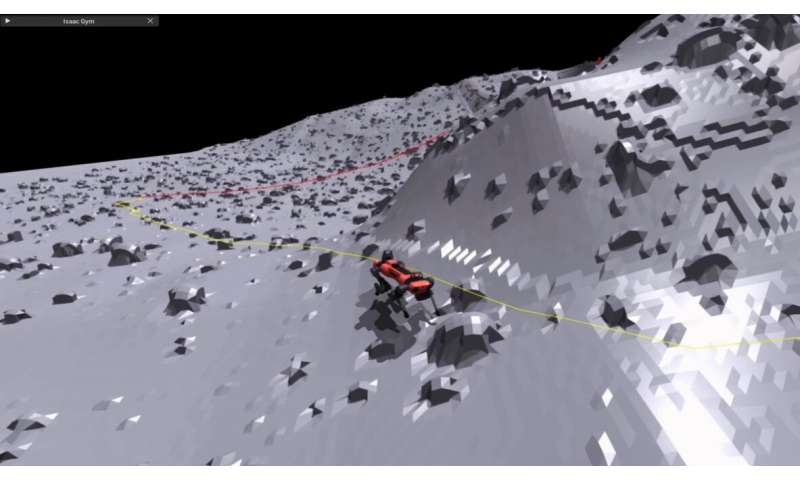
The LEAP rover is educated utilizing a Reinforcement Studying method in a digital atmosphere to simulate the lunar terrain, gravity and dust properties. Credit score: ETH Zürich/RSL Robotics Labs
-

LEAP (Legged Exploration of the Aristarchus Plateau) is a mission idea examine funded by ESA to discover a few of the most difficult lunar terrains. Credit score: ETH Zürich/RSL Robotics Labs
-
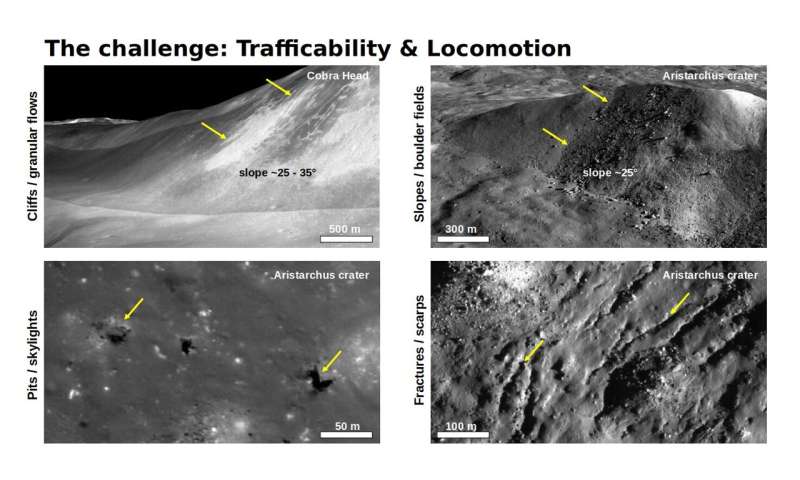
LEAP’s goal is the Aristarchus plateau, a area of the Moon that’s notably wealthy in geologic options however extremely difficult to entry. Credit score: NASA/ESA

“Apparently, ANYmal began to make use of a jumping-like mode of locomotion, simply because the Apollo Astronauts did—realizing that leaping will be extra vitality environment friendly than strolling,” stated Bambach.
The present design stays under 100 kg and consists of 10 kg of scientific payload mass, notionally being able to carrying multispectral sensors, floor penetrating radar, mass spectrometers, gravimeters, and different instrumentation.
“LEAP’s capability to gather chosen samples and convey them to a lander or ascent car provides further thrilling alternatives for pattern a return missions in extremely difficult environments on the moon or Mars,” stated Bambach.
www.epsc2022.eu/
Offered by
Europlanet
Quotation:
4-legged leaping robots to discover the moon (2022, September 21)
retrieved 21 September 2022
from https://phys.org/information/2022-09-four-legged-robots-explore-moon.html
This doc is topic to copyright. Other than any honest dealing for the aim of personal examine or analysis, no
half could also be reproduced with out the written permission. The content material is supplied for data functions solely.